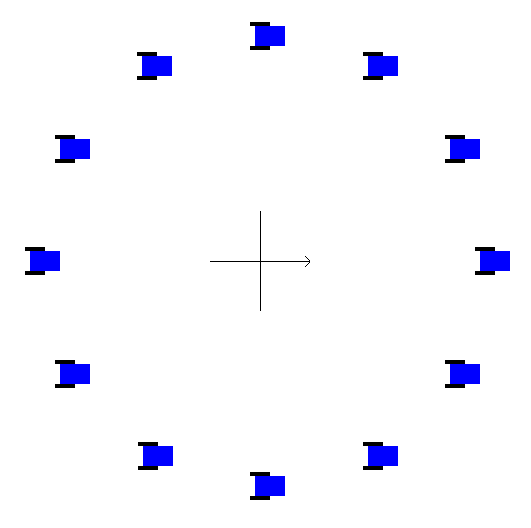
 A test program uses 12 starting positions with goal at center:
A test program uses 12 starting positions with goal at center:
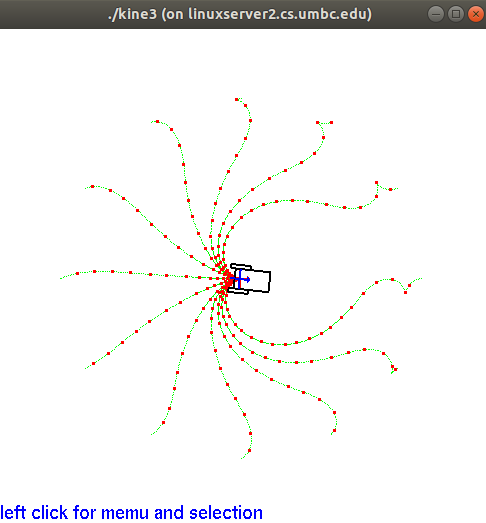
 A program kine3.c generates these paths to the goal:
A program kine3.c generates these paths to the goal:
 kine3.c source code
# turtle3.py3 output
kine3.c source code
# turtle3.py3 output
<- previous index next ->
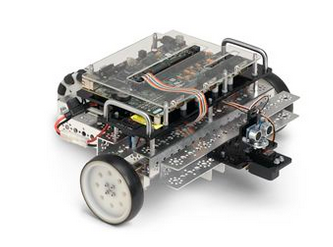
A robot can be programmed to move itself to a goal at some x,y position, facing angle theta. You can build or buy toy robots. Here is DaNI
<- previous index next ->
Many web sites on Java GUI, AWT, Swing, etc. Many web sites on Python wx, tk, qt, etc.