Introduction to Computer Animation
September 2000
David S. Ebert
Main Categories
- Key Framing
- Burtnyk and Wein 1971 - MSGEN
- Animation produced: Hunger by Peter Feldes
- Specify position of object/parts at specific points in time
(key frames)
- Use software to interpolate motion between those key
positions (tweening or
inbetweening).
- Traditional (handdrawn) animation - lead animator defined
key frames, inbetweener drew the inbetween frames.
- Can use a variety of methods for interpolation to make the
motion smooth, including ease-in and ease-out curves.
- Example of 3 keyframes for an animated ball
- Scripting Systems - Animation Languages
- LISP commonly used
- Very powerful, flexible
- ASAS (Reynolds 82)
- MIRA (Magnanet 85)
- Kinematics (forward)
- Specification of motion independent of the underlying
forces.
- Direct specification of joint motion - rotation and
translation, of each joint
- Kochanek 84, Badler 85
- Adapted from physics - position, velocity, acceleration
- Inverse Kinematics
- Specification of end effector potion or motion only
- Goal Directed Motion
- Goal Directed Motion
- Graphics use adapted from robotics field
- System automatically calcuates the motion of each
underlying part.
- This inverse solution involves much more
calculation.
- As the number of joints increases, the solution space
becomes large and
- the problem becomes undefined.
- May have multiple solutions or no solution.
- Often dealing with nonlinear sets of equations.
- Constraints are added to reduce the solution space.
- Minimization of Maximization techniques are then applied to
find a solution.
- Example of moving 2 segments (Image
Courtesy of Rick Parent):
- Articulated Figures
- Structure that consists of a series of rigid links and
joints.
- Hierarchical transformation applied to allow movement
specification at higher levels
- to propogate to lower joints.
- Often Inverse kinematics used for complicated articulated
structures.
- Early work at Ohio State:
- Zeltzer 1982 -Kinematics
- Girard 1985 - Inverse Kinematics
- Example of jointed kinematics where each joints rotation is
specified: (courtesy of Rick Parent):
- Skeletal / Character Animation
- Zeltzer - 1982 - Kinematics based animation of walk cycle
- Girard 1985 -IK for multi-legged animation
- main computation time for solving equations
from Jacobian
- Badler - JACK system ~1987
- Character with skin & Muscle layer
- Chadwick 1989
- Character with complicated skin system and better muscles
- Wilhelms 1997
- Rigid Body Dynamics
- Solving F=ma equations, conservation of momentum, etc.
- Elastic collisions
- Hahn's work - 1988
- Barraff's work on accurate collision detection and
deformation forces.
- Inverse Dynamics
- Specify goal position, inverse calculation of forces
- Barr's work early 1990's (teleological modeling)
- Flexible Object Dynamics
- 3D Field forces applied to object
- Free-Form Deformations common technique (classical) -
Sederberg 1986
- Embed model in a 3D lattice, deform lattice,
recalculate location of model points
- Mass + Spring model
- model composed of a collection of masses and
springs
- Solve spring equation with external forces -
e.g., Haumann 1989
- Facial Animation
- Early Work by Waters, Parke, and Badler
- "Simple" muscle models that pull and squeeze the face
- Example of more recent work is the work in Antz by Beth
Hofer and the work in Babe

- More accurate physical Model by Keith Waters in the past 3 years.
- Procedural animation model by Ken Perlin can be found at http://www.mrl.nyu.edu/perlin/
- Goal here is to come up with intuitive
expression sliders.
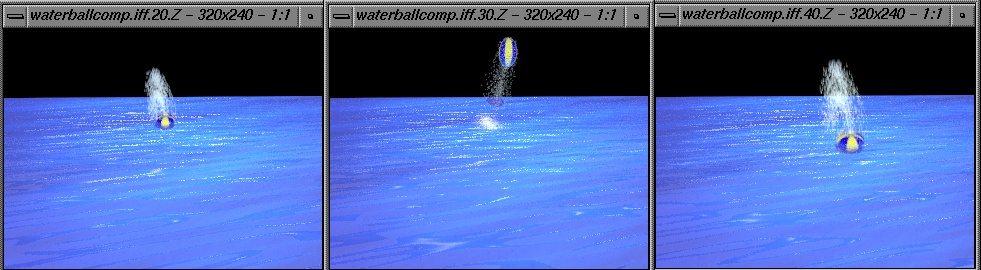
- Other Techniques:
- Particle Systems
- Procedural Animation
- Evolving Organics, Natural Phenomena
- Goal Directed Animation and Behavioral
Animation
- Intelligent Characters & Improvisational
Animation
Main Page