Project 1.
150 points. [Keycode: PRJ1].
Due by 11:59pm on March 8, 2009.
Introduction
In project 0, the objective of this project is to add some new system calls
to the Linux Kernel and write a small driver program to test these system
calls.
Let us assume you work for the Awesome Widgets Kompany (AWK). AWK has a
hardware device that takes a data buffer and applies a convolution filter to it.
It can do this much faster than the processor. The only problem is that the
device isn't finished yet. In order to keep their software people busy and to
get a useful product out faster, AWK wants to create a prototype interface for
the device.
Your Boss (PHB) at AWK, obviously a former java programmer who has never had
the benefit of taking an operating systems class, has tasked you with creating
the interface to the device. Despite your reasonable objections that a loadable
module or driver would be far better, he would like you to do this by creating
new system calls to provide the interface that will eventually support the
hardware.
Before you begin, create a custom kernel specific for Project 1 by copying
the pristine sources to a new folder, e.g. /usr/src/linux-prj1, and
changing the symbolic link /usr/src/linux to point to it.
Hereafter let $linux stand for
the /usr/src/linux directory with the experimental kernel sources.
Name your custom kernel for Project 1 to append
"-GLUSRNM-cs421prj1" to the display name, where GLUSRNM is your UMBC
GL username.
Part 0: Convolution
Convolution is described in numerous signal processing texts as listed at the end of this section.
Remember, we are not teaching you signal processing in this course, but rather are focusing on Linux. Let us first mathematically define
the convolution operation:
Given an input signal x[n] and a “filter” h[k] each of different length, the output signal
y[n] is

Note, that the two summations in the above equation (EQUATION (1)) are equivalent; meaning that x[k]
and h[k] are interchangeable. Also note that “
 ”
stands for convolution and is a short form for the formula itself. Having a formula gives us a method to compute the output y[n] easily as may be seen in the following tabular scheme.
”
stands for convolution and is a short form for the formula itself. Having a formula gives us a method to compute the output y[n] easily as may be seen in the following tabular scheme.
Method 1
Consider an x[k], h[k] given
below:
Let us build a table that explicitly
expresses the convolution as described in the above equations:
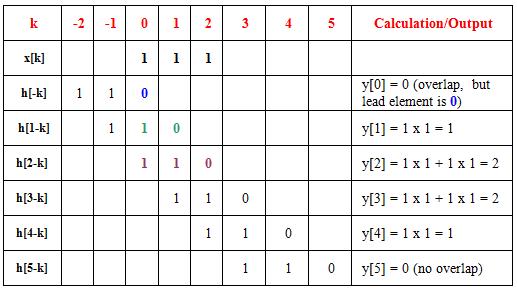
We now explain the steps in
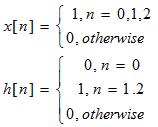
the above table. Firstly x[n] = [1 1 1] and
h[n] = [0 1 1] (see the definitions), but we have taken
h[n] and “flipped” it or made a mirror image of it, h[-n] = [1
1 0]. We have also moved this new array as far left as we can
take it so that it just overlaps x[k] (see table, 3rd row).
In this position the two numbers that overlap in the column that has 0 at the top is 1 and 0. The product
1 x 0 = 0 and that is the output. Now take
the row h[1-k] where the overlap is in the 0th and 1st columns. The product
is 1 x 1 + 1 x 0 = 1. Note how h[1-k] is essentially
the same as h[-k], but is slid over to the right by one position. Similarly,
consider h[2-k]. Now the overlap is in the 0th, 1st and 2nd columns. The product
is 1 x 1 + 1 x 1 + 1 x 0 = 2. The student should now be able
to do the rest of the calculation. Note how h[k] had 3 elements [0
1 1] and x[k] also had 3 elements [1 1 1]. However,
the output y[n] has 5 elements [0 1 2 2 1].
In general if x[n] has N elements and h[n] has K elements, then y[k]
will have N+K-1 elements.
Method 2
It is important to note again
(as seen in the last sentence of the previous paragraph) that x[n] and
h[n] need not be the same length. As it turns out, h[n] can be fairly
short in length whereas, x[n] is not restricted to be so. In fact, in
the signal processing literature, h[n] is called the filter and x[n]
the signal. Now if the signal is say a performance of the pop song Seven
Nation Army by the White Stripes, then the signal is going to
be a vector of a few million elements while the filter h[n] may be less
than 100 elements long. Loading the entire signal x[n] into memory is
not a very sensible option. Luckily mathematics comes to the rescue.
The convolution operation as defined by EQUATION (1) remains the same,
but some additional steps are necessary. Here is how you should proceed.
Consider x = [1,1,2,1,2,2,1,1] (comma separated) and break it
into three contiguous sub-blocks x0 = [1,1,2], x1 = [1,2,2]
and x2 = [1,1,0]. Note, we have added a 0 to x2 in order to make
it have a length of three. The vector and sub-blocking process is shown
below.
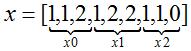
Note that x0 starts at position 0 in the original vector x. Similarly x1 starts at position 3 in vector x and x2 starts at position 6
in vector x assuming indexing begins at 0. We will use this fact below.
Now consider a vector h = [1, 2, -1, 1]. Since both x and h have small lengths, we can do direct convolution as explained in method 1 I leave that as an exercise
for the students. Let us instead use a method that allows efficient use of memory. Form the three sub-convolutions (now each of h, x0, x1, and x2 are nearly the same length).
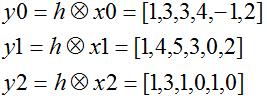
Now align the outputs y0, y1 and y2 as shown in the table below.

So the output is given by the
particular alignment of y0 at position 0, y1 and
position 3 and y2 at position 6 (mentioned earlier) and addition.
There are 8 elements in the original x vector and 4 elements
in h, therefore the convolution will produce 8+4-1=11 elements
as output. If you look at the table above, there are 12 columns (with
the 11th column being redundant and inserted for completeness
sake). How about the memory requirements for method 1 versus
method 2? Method 1 requires x, h and the output
y to be in memory or 8 + 4 + 11 = 23 elements. In method 2 you will
read in x in blocks of 3 elements, h has 4 elements and
any of y0, y1 and y2 will have 4 + 3 -1 = 6 elements.
Also, we have to account for the overlapped elements of y0,
y1 and y2. The overlapped elements will be 6 (length of convolution
output of h and x0) 3 (length of y0) = 3 elements.
So at any time you will have 3 + 4 + 6 +3 = 16 elements in memory. Compare
23 elements for method 1 for 16 elements for method 2.
While this may not seem like much, if N, the size of x grows
large, the memory savings can be quite large.
So in general we break x
into blocks of L (you may have to pad the last block with 0s to make
it of length L). Each block is convolved with a filter h of length
M. For this scheme to work L > M. The output of each block convolution
is L+M-1 elements. If we start indexing with 0 then the next block convolution
will start at L, the next block will start at 2L etc.
Here is pseudo code to do the convolution (blockcon)
Input h (length M) and block x (length L) (the filter and the data block)
1. Compute output  (using
method 1 or other method)
(using
method 1 or other method)
2. for i = 0,1, …, M-1
y(i) = y(i) + y_temp(i) (overlap)
y_temp(i) = y(i+L) (save tail)
The algorithm above uses an M dimensional vector y_temp to store the appropriate samples of the block. For the first block, y_temp needs to be initialized to 0. The
student should follow the algorithm and see if it matches the output of the above table.
Here is pseudo code as to how your algorithm may work :
for () {Keep reading input blocks except last block which is treated separately
blockcon()
process input block that was just read input length of x is L and h is M
write output block created by blockcon() to file
}
blockcon()
Last block will an x that has number of elements N <= L. h remains length M
Write output block
created by blockcon(S) to file
References:
The following books are suggested reading if you want to get into the nitty-gritty of signal processing.
Oppenheim, A. V., Shafer, R. W. and Buck, J. R., Discrete-Time Signal Processing, 2nd ed., Prentice Hall, 1999
Proakis, J. G. and Manolakis, J. G. , Digital Signal Processing, 4th ed, Prentice Hall, 2007
Mandal, M.and Asif, A. , Continuous and Discrete Time Signals and Systems, Cambridge University Press, 2007
Which Method?
The student should choose either of method 1 or method 2 to do the
project. However, if a student chooses method 1, he/she will get no more
than 100% of the total points assigned for this project. On the other
hand, students who choose method 2 may get upto 110% of the total
points, i.e., we are offering extra credit. Note, in using either method 1
or method 2, students are expected to provide a correct working
implementation of convolution. Simply attempting to use method 2 does not
give the student the right to receive the extra credit, or any credit.
Part 1: Add the system calls to the kernel.
You will add four new system calls to the kernel. One will receive and process
the buffer, one will send the buffer back, and the others will set options to
control the processing.
The function prototypes and semantics for your system calls must be:
-
long setAWK421(const char *buf, unsigned long size); -
Retrieve data in the userspace address provided by buf and store
size bytes in kernelspace for later processing and retrieval.
Returns the number of bytes successfully copied or a negative number
to indicate a failure.
-
long getAWK421(char *buf, unsigned long size); -
Retrieve the processed data stored in kernelspace and store size
bytes in the userspace address provided by buf. Returns the
number of bytes successfully copied or a negative number to indicate
failure. This syscall will fail if no active filter exists.
-
long addAWKFilter421(const char *filter, unsigned long size); -
Adds a new convolution filter to the kernel. Returns a filter ID number
or a negative number to indicate a failure.
-
long setAWKFilter421(long id); -
Sets the filter id as the active filter, which is the filter
used when data is retrieved. Returns the id if successful, 0 indicating
the filter id does not exist, or a negative number to indicate any other
failure.
-
long delAWKFilter421(long id); -
Remove the filter identified by id from the list of available
filters. Returns the id if successful, 0 indicating
the filter id does not exist, or a negative number to indicate any other
failure. If the filter is the active filter, set another available filter
as the active filter, or indicate that there are no active filters.
-
long listAWKFilterID421(long *fids, unsigned long size); -
Store a list of up to size filter id numbers starting at the userspace address
indicated by fids. Return the number of filters stored or a
negative number to indicate a failure.
-
long clearAWK421(); -
Resets the buffer (note that this leaves the filters alone). Should
return 0, unless there is a catastrophic failure/data corruption that
prevents the data from being cleared.
You may assume that there are at most 256 possible filters. Each of which are at
most 512 bytes long. You may also assume that the largest data buffer you can
store is 1K, or 1024 bytes. Do not assume that the filters are null
terminated strings or that they or their results are printable characters.
Make sure that your system calls have exactly the same signatures as above,
otherwise our test programs will fail and thus your assignment as well. Your
underlying implementation is your decision. You will need to explain the
pros and cons of your decisions in your report file.
N.B. System calls can be called concurrently, you will need to lock
your internal structures to make sure that access to them is mutually exclusive
(otherwise two processes writing to your data at the same time will produce very
interesting results).
N.B. We never specified when the data was processed in the
description above. You should pick and explain why you chose that option in
your report.
Part 2: User mode driver and test programs
Now that you have system calls created to provide the interface, your PHB
demands that you write a reference implementation to show the other programmers
how to use it. He wants three programs:
-
loadfilters <file> - Takes a file with a list of
filter file names and loads each filter into the kernel. The file
should be given as the only command line parameter. This program should
print a list of filter ids back to the command prompt.
-
fcm - The "Filter Commander" provide an interactive
interface to the user to provide the following functions:
- List, Select, Add, Remove filters. Should ask for a filename
or id number as required.
- Clear, Save, or Load messages. Should ask for a filename and
the amount of data to be processed for each operation.
-
proclarge <infile> <outfile> <fid> -
Process a large infile and store it in outfile using
the filer identified by fid. The fid command is
optional, and even if the id given does not exist the system should use
the active filter. This command should clear any previously existing
buffer data.
System calls use "errno" for reporting their errors. You will have
to use it too.
Filter and message files are raw data files, not ascii. Each program should
detect and report any errors thrown by the system on stderr, and any other useful
information (e.g. the number of bytes successfully processed or sent) should be
reported to stdout.
N.B. You should use your own test program to test your system calls
to ensure that they work as specified and they can handle all kinds of
(good and bad) inputs. Include these extra programs in your submission.
Part 3: Project Questions
- How does errno work?
- What synchronization method did you use? What other kernel
synchronization methods are available, and how would you use them? Which
method is the best for the given problem? Which is the worst? Why
did you choose the one you chose?
- What other ways could you have chosen to store the data you needed
to store in the kernel? Discuss the pros and cons of each relative to what
you chose.
- The project description states that a loadable module or driver
compiled into the kernel would be better, why?
- How do system calls work? Explain the entire execution path from
userspace to kernelspace and back, and be specific to the intel ia32/x86
architecture.
Hints & References
What to submit
Your patchfile should be named patchprj1.diff. Many students have
made the mistake of misnaming their patch or putting it in the wrong directory
in project 0. It should be located in the base directory. You should test your
patch to make sure that it works. If it does not work or is in the wrong
directory, it can have a significant impact on your grade. If you do nothing
else, be absolutely 100% sure that your patch is working, named correctly, and
in the right location in your submission archive!
Use the guidelines provided by project 0. Everything from project 0 (config,
readme, report, etc) is required for all projects. Be sure to include any source
files in the kernel that you changed or added to the kernel codebase
(there should be several). Describe the organization of these files (where they
were from relative to kernel sources v. where they are now) in your readme.
You should also be sure to include sample output showing the execution of your
driver programs (this can be obtained by running the "script" command and
submitting the file "typescript" generated as output by script). Students often
forget this step.
It is very important for your grade that your project submission be well organized
and that you make it very clear what you have done. Grading each submission
takes a significant amount of effort and time. The TAs will not waste their time
searching your submission to find the required pieces, you will simply lose
points if they can't find what they are looking for. While you may be able to
get back some credit by meeting with a TA, this will waste both your and the TA's
time. With this in mind, you should be ready to spend about 1-2hrs preparing
and verifying your archive for submission.